

![���ij�������ķ����ѽ��� open list �У��t�z���@�l·���Ƿ������Ҳ�����f���ɮ�ǰ���� ( �҂��x�еķ��� ) ���_�ǂ������Ƿ���и�С�� G ֵ������]�У������κβ����� �෴����� G ֵ��С���t���ǂ�����ĸ��H�O�鮔ǰ���� ( �҂��x�еķ��� ) ��Ȼ������Ӌ���ǂ������ F ֵ�� G ֵ��](http://img.Deepxp.cn/upload/computer_net/soft_301104209_4.jpg)
- arp����Ԕ���f��_arp����ļ��������cʹ
- arp�f�h��ɶ�ط�һ��_arp�nj�����һ�ӵ�
- ARP�f�h��������ɶ_ARP�f�h�Ĺ���ԭ��
- ��X�p�W���O��һ����Wһ���ȾW_�p�W���p�W�P
- �Α�A�nj�·�㷨�̳�Ԕ���f��_a�nj�·�㷨·
- H3C SecPath UTMϵ�з���������
- H3C FTP�O���ς����d�O���ļ��k��
- �A��/H3C/˼�ƾW�j���̎��J�C����Щ_�W�j
- Wiresharkץ�����ߵĹ���ԭ����ɶ��
- NAT�W�j��z�y����ʹ���k���D�Ľ����̳�
- Cisco�o����AP�O�û��A�̳�
- ���þW�j�c��ͥ�W�j�ą^�e_���þW�j�c���þW�j

�Α�A�nj�·�㷨�̳�Ԕ���f��_a�nj�·�㷨·������
�l���r�g:2024-04-09 ����Դ:���ϵ�y���d �g�[:
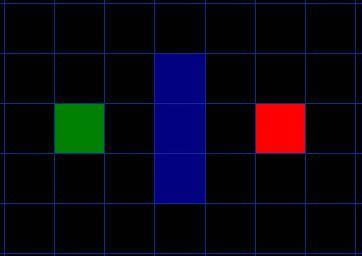
| �Α�A�nj�·�㷨��ÿ���Α��_�l�߱،W���ؕ����Ԅӌ�·�n�̣�����IT�����С�����o��λͬ�W����a�nj�·�㷨·������Ԕ��̳̣�������������Α�����Ό��F�Ԅӌ�·���@�^�ϵK� A�nj�·�㷨�����mȻ������ A* �㷨�����J�������ף����nj��ڳ��W�߁��f�� A* ���㷨߀�Ǻ��s�ġ� �����^��(The Search Area)�҂����Oij��Ҫ�� A �c�Ƅӵ� B �c�������@���c֮�g��һ�����_�����D��ʾ�� �Gɫ�� A ���tɫ�� B �����g�{ɫ�lj���
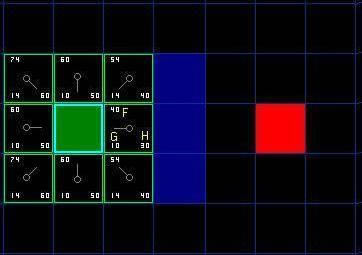
�㑪ԓע��ˣ��҂���Ҫ�ь��ą^�ֳ��������εĸ��ӡ��@�nj�·�ĵ�һ�������������^�����҂��@������һ�ӡ��@������ķ������҂��������^������ 2 �S���M�����M��ÿһ헴���һ�����ӣ����Ġ�B���ǿ��� (walkalbe) �Ͳ����� (unwalkable) ��ͨ�^Ӌ����� A �� B��Ҫ���^��Щ�����ҵ���·����һ��·���ҵ��ˣ�������һ������������Ƅӵ���һ����������ģ�ֱ�����_Ŀ�ĵء� ����������c�҂��ɞ�“���c (nodes) ”��������x�^�����P�� A* ��·�㷨�����£�����l�F�˂���������ӑՓ���c����ʲô��ֱ�������鷽���أ�����҂��п��ܰ������^���������׃�ζ����������Σ������������߅�Σ����Σ����������������׃�Ρ������c���Է��������߅�����棬���Է��ڶ�׃�ε����ģ�Ҳ���Է��ڶ�߅�ε�߅�ϡ��҂�ʹ���@��ϵ�y���������Ρ� �_ʼ����(Starting the Search)һ���҂����ь��^����һ�M���������Ĺ��c������������һ�ӣ��҂���һ��Ҫ���ı��Dz������·������ A* �У��҂������c�_ʼ���z���������ķ���Ȼ�������ܔUչ��ֱ���ҵ�Ŀ�ˡ� �҂��@���_ʼ�҂��Č�·��;�� 1�������c A �_ʼ���������ͼ��뵽һ���ɷ���M�ɵ� open list( �_���б� ) �С��@�� open list ���c����һ��ُ��Ρ���Ȼ�F�� open list ��ֻ��һ헣����������c A �������������������헡� Open list ��ĸ�����·�����ܕ�����;���^�ģ�Ҳ�п��ܲ����^�������� open list ��һ�����z��ķ����б��� 2���鿴�c���c A �����ķ��� ( �������Љ�����ռ�I�ķ�������ռ�I�ķ��������Ƿ�����ռ�I�ķ��� ) �������п��ߵ� (walkable) ��ɵ��_�� (reachable) ����Ҳ���뵽 open list �С������c A �O�Þ��@Щ����ĸ��H (parent node �� parent square) �����҂���ۙ·���r���@Щ�����c�ă����Ǻ���Ҫ�ġ��Ժ��ጡ� 3�� �� A �� open list ���Ƴ������뵽 close list( ���]�б� ) �У� close list �е�ÿ�������ǬF�ڲ���Ҫ���Pע�ġ� ���D��ʾ����Gɫ�ķ�������c��������������{ɫ����ʾԓ�����뵽�� close list ���c�������ĺ�ɫ��������Ҫ���z��ģ���������������Gɫ��ÿ���ڷ�����һ����ɫ��ָ�ָ�������ĸ����c���@�������c A ��
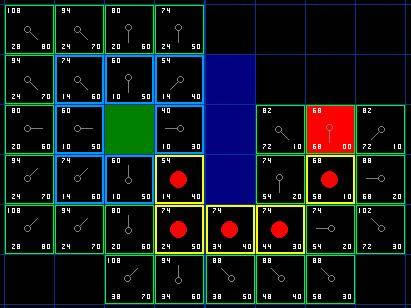
��һ�����҂���Ҫ�� open list ���xһ���c���c A �����ķ�������������һ�ӻ����ٵ��؏�ǰ��IJ��E�����ǵ����x���Ă�������أ�������С F ֵ���ǂ��� ·������(Path Sorting)Ӌ����M��·���ķ�����P�I�������@����ʽ�� F = G + H �@� G = �����c A �Ƅӵ�ָ��������ƄӴ��r���������_ԓ��������ɵ�·���� H = ��ָ���ķ����Ƅӵ��K�c B �Ĺ���ɱ����@��ͨ�����Q��ԇ̽�������c�˻�������ʲô�@ô���أ�����@�ǂ��y��ֱ���҂��ҵ���·���҂��ŕ�֪�������ľ��x�����;���и��N���ӵĖ|�� ( ���牦�ڣ�ˮ�� ) �����̳̌�����һ�NӋ�� H �ķ�������Ҳ�����ھW���ҵ����������� �҂���·�����@ô�a���ģ����ͱ�v open list ���x�� F ֵ��С�ķ����@���^���Ժ�Ԕ���������҂�߀���ȿ�����ôȥӋ������ĵ�ʽ�� ����������G �Ǐ����c���Ƅӵ�ָ��������ƄӴ��r���ڱ����У��M��Ϳv����ƄӴ��r�� 10 �����Ǿ����ƄӴ��r�� 14 ��֮����ʹ���@Щ����������錍�H�Č����ƄӾ��x�� 2 ��ƽ�����������ǽ��Ƶ� 1.414 ���ęM���v���ƄӴ��r��ʹ�� 10 �� 14 ���Ǟ��˺�����Ҋ�������nj��ģ��҂��������_�ź�С����Ӌ�㡣�@�������҂��]���@���������Dz�ϲ�g���W��ʹ���@Щ����Ҳ����ʹӋ��C���졣�Ժ������l�F�������ʹ���@Щ���ɣ���·�㷨�������� ��Ȼ�҂����������_ָ�������·����Ӌ�� G ֵ����ôӋ���ԓ����� G ֵ�ķ��������ҳ��丸�H�� G ֵ��Ȼ���H��ֱ������߀��б��������� 10 �� 14 ���S���҂��x�_���c���õ�����ķ����@��������׃�ø������ʡ� �кܶ�����Թ��� H ֵ���@���҂�ʹ�� Manhattan ������Ӌ��Į�ǰ����M���v���Ƅӵ��_Ŀ�������^�ķ������Ԍ����Ƅӣ�Ȼ��ѿ������� 10 ��֮���Խ��� Manhattan ������������@����yӋ��һ�����c����һ�����c�����^�Ľօ^�������㲻��б���^�օ^����Ҫ���ǣ�Ӌ�� H �ǣ�Ҫ����·���е��ϵK��@�nj�ʣ����x�Ĺ���ֵ�������nj��Hֵ����˲ŷQ��ԇ̽���� �� G �� H ��ӱ�õ� F ���҂���һ���ĽY�����D��ʾ��ÿ���������� F �� G �� H ��ֵ���������c��߅�ķ����ǘӣ����Ͻ��� F �����½��� G �����½��� H ��
�ã��F���҂��������е�һЩ�����ژ�����ĸ�ķ��� G = 10 ���@�����ˮƽ��������c������ֻ��һ������ľ��x���c���cֱ���������Ϸ����·����ķ���� G ֵ���� 10 �����Ǿ��ķ��� G ֵ���� 14 �� H ֵͨ�^�������c�ڽK�c ( �tɫ���� ) �� Manhattan ���x�õ����H���M��Ϳv���Ƅӣ����Һ�����;�ĉ��ڡ�ʹ���@�N��ʽ�����c��߅�ķ��K�c�� 3 ������ľ��x����� H = 30 ���@�������Ϸ��ķ��K�c�� 4 ������ľ��x ( ע��ֻӋ��M��Ϳv����x ) ����� H = 40 �����������ķ����������ͬ�ӵķ���֪�� H ֵ����εÁ��ġ� ÿ������� F ֵ�����fһ�Σ�ֱ�Ӱ� G ֵ�� H ֵ��ӾͿ����ˡ� �^�m����(Continuing the Search)�����^�m�������҂��� open list ���x�� F ֵ��С�� ( ���� ) ���c��Ȼ�����x��ķ��������²����� 4�������� open list ��ȡ�����ŵ� close list �С� 5���z�������c�������ķ����������� close list �л��Dz����� (unwalkable) �ķ��� ( ���牦��ˮ�����������Ƿ����� ) �����������open lsit �У��t���������뵽 open list �С� ���҂��x���ķ����O�Þ��@Щ�¼���ķ���ĸ��H�� 6�����ij�������ķ����ѽ��� open list �У��t�z���@�l·���Ƿ������Ҳ�����f���ɮ�ǰ���� ( �҂��x�еķ��� ) ���_�ǂ������Ƿ���и�С�� G ֵ������]�У������κβ����� �෴����� G ֵ��С���t���ǂ�����ĸ��H�O�鮔ǰ���� ( �҂��x�еķ��� ) ��Ȼ������Ӌ���ǂ������ F ֵ�� G ֵ�������߀�Ǻܻ�����Ո�����D��ʾ��
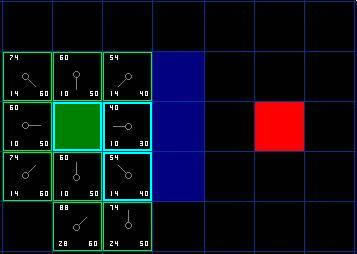
�҂�����������ô�����ġ����҂������ 9 �������У�߀�� 8 ���� open list �У����c�������� close list �С����@Щ�����У����c��߅�ĸ��ӵ� F ֵ 40 ��С������҂��x���@������������һ��Ҫ̎���ķ�������������{�������� ���ȣ��҂������� open list �Ƶ� close list �� ( �@���Ǟ�ʲô���{��������ԭ���� ) ��Ȼ���҂��z���c�������ķ�������߅�ķ����lj��ڣ��҂����ԡ�����߅�ķ��������c���� close list �У��҂�Ҳ���ԡ����� 4 �������ķ������ open list �У��҂���Ҫ�z�齛���@�������_�����·���Ƿ���ã�ʹ�� G ֵ���ж����҂���������ķ������F�ڵ� G ֵ�� 14 ������҂����ɮ�ǰ�����_��� G ֵ������ 20(���� 10 �鵽�_��ǰ����� G ֵ������߀Ҫ���ϏĮ�ǰ����v���Ƅӵ����淽��� G ֵ 10) ���@Ȼ 20 �� 14 ������@�������·��������㿴�D��͕����ס�ֱ�ӏ����c�،��Ǿ��Ƅӵ��ǂ�������șM���Ƅ��ٿv���Ƅ�Ҫ�á� ���� 4 ���ѽ��� open list �е��������z��]�аl�F���ɮ�ǰ����ĸ���·��������҂������κθ�׃���F���҂��ѽ��z���ˮ�ǰ��������������ķ���Ҳ����������̎�����Ǖr���x����һ����̎���ķ����ˡ� ����ٴα�v�҂��� open list ���F����ֻ�� 7 �������ˣ��҂���Ҫ�x�� F ֵ��С���ǂ�����Ȥ���ǣ��@���Ѓɂ������ F ֵ�� 54 ���x�Ă��أ��]ʲô�Pϵ�����ٶ��Ͽ��]���x�������� open list �ķ�����졣�@�������ڌ�·�^���У�������Ŀ�˕r������ʹ�����ҵ��ķ����ƫ�á������@������Ҫ�� ( ����ͬ�����IJ�ͬ�����������а汾�� A* �ҵ����L�IJ�ͬ·�� ) �� �҂��x�����c���·��ķ������D��ʾ��
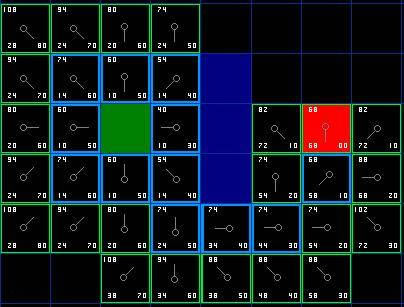
�@�Σ����҂��z�������ķ���r���҂��l�F����߅�ķ����lj������Ե��������Ҳһ�ӡ� �҂��щ������һ��Ҳ���Ե�����ʲô������������Խ���ǵ�Ԓ���㲻��ֱ�ӏĮ�ǰ�����Ƅӵ��ǂ���������Ҫ�������ߣ�Ȼ�����Ƅӵ��ǂ������@�Ӂ��@�^���ǡ� ( ע�⣺��Խ���ǵ�Ҏ�t�ǿ��x�ģ���ه����Ĺ��c����ô���õ� ) �@��߀ʣ�� 5 �������ķ���ǰ��������� 2 ������߀�]�м��� open list �������������룬ͬ�r�Ѯ�ǰ�����O�������ĸ��H����ʣ�µ�3 �������У��� 2 ���ѽ��� close list �� ( һ�������c��һ���Ǯ�ǰ��������ķ���������� ) ���҂��������������һ������Ҳ���Ǯ�ǰ������߅�ķ����҂��z�齛�ɮ�ǰ�����_�����Ƿ���и�С�� G ֵ���]�С�����҂��ʂ�� open list ���x����һ����̎���ķ��� �����؏��@���^�̣�ֱ���ѽK�cҲ���뵽�� open list �У��˕r���D��ʾ��
ע�⣺�����c���� 2 ��ķ���ĸ��H�ѽ��cǰ�治ͬ�ˡ�֮ǰ���� G ֵ�� 28 ����ָ�������Ϸ��ķ��F������ G ֵ�� 20 ������ָ�������Ϸ��ķ����@�ڌ�·�^���е�ij̎�l����ʹ����·���r G ֵ���^�z�鲢��׃�ø��ͣ���˸����c�������O�ã� G �� F ֵ������Ӌ�㡣�M���@һ׃���ڱ����в�����Ҫ�������ںܶ������У��@�N׃��������·�Y���ľ�׃���� ��ô�҂���ô��ȥ�_�����H·���أ��ܺ��Σ��ĽK�c�_ʼ���������^���c�Ƅӣ��@����ͱ����ص������c���@�������·�������D��ʾ�������c A �Ƅӵ��K�c B ���Ǻ��Ώ�·���ϵ�һ������������Ƅӵ���һ����������ģ�ֱ��Ŀ�ˡ������@ô���Σ�
�Α�A*�Ԅӌ�·�㷨���Y(Summary of the A* Method)�F���҂������в��E����һ�� 1�� �����c���� open list �� 2���؏������^�̣� a����v open list ������ F ֵ��С�Ĺ��c���������鮔ǰҪ̎���Ĺ��c�� b�����@�����c�Ƶ� close list �� c������ǰ����� 8 �����������ÿһ������ �� ������Dz��ɵ��_�Ļ������� close list �У�����������t�������²����� �� ��������� open list �У��������� open list �����ҰѮ�ǰ�����O�Þ����ĸ��H��ӛ�ԓ����� F �� G �� H ֵ�� �� ������ѽ��� open list �У��z���@�l·�� ( �����ɮ�ǰ�����_������ ) �Ƿ���ã��� G ֵ����������С�� G ֵ��ʾ�@�Ǹ��õ�·����������@�ӣ������ĸ��H�O�Þ鮔ǰ��������Ӌ������ G �� F ֵ�������� open list �ǰ� F ֵ�����Ԓ����׃���������Ҫ�������� d��ֹͣ������ �� �ѽK�c���뵽�� open list �У��˕r·���ѽ��ҵ��ˣ����� �� ���ҽK�cʧ�������� open list �ǿյģ��˕r�]��·���� 3������·�����ĽK�c�_ʼ��ÿ���������������c�Ƅ�ֱ�����c���@�������·���� �}��Ԓ(Small Rant) ՈԭՏ�ҵ��x�}�������ھW�ϻ�Փ���Ͽ������N�P�� A* �㷨��ӑՓ�r����ż�����l�FһЩ A* �Ĵ��a�����H���������ǡ�Ҫʹ�� A* �����횰�������ӑՓ������Ԫ�� ---- ������ open list �� close list ��·�����r G �� H �� F ��Ҳ�кܶ������Č�·�㷨���@Щ�㷨������ A* �㷨�� A* ���J������õġ��ڱ���ĩβ���õ�һЩ������ Bryan Stout ӑՓ��������һ���֣����������ă�ȱ�c����ijЩ�r������Զ��Г�һ�������������Լ�����ʲô�� ���F��ע��(Notes on Implemetation) �F�����ѽ������˻����������@�������ڌ��Լ��ij�������Ҫ���]��һЩ�~��Ė|���� 1���S�o Open List ���@�� A* ������Ҫ�IJ��֡�ÿ�����L�� Open list ���㶼Ҫ�ҳ�������С F ֵ�ķ����ЎN�������������@����������S�Ᵽ��·��Ԫ�أ�������Ҫ�ҵ��� ����С F ֵ�ķ���r����v���� open list ���@���ܺ��Σ������ں��L��·�����������@����������ͨ�^�S�oһ���ź���ı�����M��ÿ�ή�����Ҫ�ҵ�������С F ֵ�ķ���r���Hȡ�����ĵ�һ헼��ɡ��Ҍ�����r���@�����õĵ�һ�������� ����С�؈D���@���ԺܺõĹ��������@�������ķ��������ٶȵ� A* ����Tʹ���˽�������ѵĖ|�����ҵij�����Ҳ�����@�������ҵĽ��@�N�����ڶ����������� 2—3 �������ڸ��L��·���ٶȳɎμ������L (10 ���������� ) �� 2��������λ����������ɺ��м��Ŀ����ҵij������ע�����ȫ������������λ���ҵČ�·�ߌ��H�Ͽ��Ի��ഩԽ���@ȡ�Q���Α�Ҳ�S���ԣ�Ҳ�S�����ԡ�������뿼�]������λ������ʹ�����Ƅӕr�@�^�˴ˣ��ҽ��h��Č�·��������������ٌ�һЩ�µij�����Д��ɂ���λ�Ƿ���l����ײ������l����ײ������Ԯa��һ���µ�·����������ʹ��һЩ�˜ʵ��\�ӷ��t���������h�����Ƅӣ��ȵȣ�ֱ���ϵK�ﲻ��;�У�Ȼ��a��һ���µ�·������ʲô��Ӌ���ʼ·���Dz�����������λ�أ����������λ�ǿ��Ԅӵģ����㵽�_�ĕr���������ܲ����Լ���λ���ϡ��@���Ԯa��һЩ�֮��ĽY����һ����λͻȻ�D��������һ���Ѳ����ڵĆ�λ��ײ��������·��Ӌ�������ʹ�Խ��·������Щ��λ��ײ�ˡ� �ڌ�·���a�к���������λ����ζ�����회���һ�ݴ��a��̎����ײ���@���Α�ļ����� 3�� һЩ�ٶȷ������ʾ����������_�l�Լ��� A* ��������Ǹľ��Ҍ��ij����������l�F��·ռ���˴����� CPU �r�g�������Ǯ������ஔ��Č�·�ߺ�һ�K�ܴ�ĵ؈D�r���������x�^�W�ϵ��Y�ϣ�����l�F�������_�l���H���ԣ��ۇ��r���Č���Ҳ���@�ӡ������l�F�������ڌ�·��׃���ˣ��@����Щ����ܲ��e�� �� ʹ��С�؈D���߸��ٵČ�·�ߡ� �� ǧ�f��Ҫͬ�r�o������·�ߌ�·��ȡ����֮���ǰ�������������У���ɢ���ׂ��Α������С��������Α���ÿ�� 40 ���ڵ��ٶ��\�У��]���ܲ��X�����������ͬ�r�д����Č�·���ڌ�·��Ԓ���������R�ϾͰl�F�Α������ˡ� �� ���]�ڵ؈D��ʹ�ø���ķ����@�p���ˌ�·�r��Ҫ�����ķ�������������������ĵ�Ԓ��������OӋ����·����������·�����L�ȶ�ʹ���ڲ�ͬ���ϡ��@Ҳ�nj��I��ʿ�����������L·��ʹ�ô���ӽ�Ŀ�˕rʹ��С���� �� ���ں��L��·�������]ʹ��·���cϵ�y�����߿����A��Ӌ��·���������Α��С� �� �A��̎����ĵ؈D��ָ����Щ�^���Dz��ɵ��_�ġ��@Щ�^��Q��“�u”�����H�ϣ����������Ǎu�Z�������DZ����ڵȰ��������ɵ��_������^�� A* �������ǣ�����V���ь�ͨ����Щ�^���·���r���������������؈D��ֱ�����п��Ե��_�ķ���ͨ�^ open list �� close list �õ���̎�����@�����M������ CPU �r�g���@����ͨ�^�A���O�����ɵ��_�ą^�����Q����ij�N���M��ӛ��@Щ��Ϣ���ڌ�·ǰ�z���������ҵ� Blitz ������У��Ҍ��˂��؈D�A̎�����������@������������ǰ�R�e��·�㷨�����Ե���·�����@���Mһ��������ٶȡ� 4����ͬ�ĵ��Γp�ģ����@���̳̺��ҵij����У�����ֻ�� 2 �N���ɵ��_�ĺͲ��ɵ��_�ġ������������Щ�ɵ��_�ĵ��Σ��ƄӴ��r������Щ���ӝɣ�ɽ�𣬵��εĘ��� �ȶ��ǿɵ��_�ĵ��Σ������ƄӴ��r��ƽ�ؾ�Ҫ�ߡ���Ƶģ���·���ƄӴ��r�ͱ� ���܇��ĵ��ε͡� ����Ӌ��o������� G ֵ�r���ϵ��εĴ��r�ͺ�����Q���@�����}�����εĽo�@Щ�������һЩ�~��Ĵ��r�Ϳ����ˡ� A* �㷨�Á����Ҵ��r��͵�·������ԓ������̎���@Щ�����ҵĺ��������У�����ֻ�п��_�Ͳ����_�ɷN�� A* ���ь���̺���ֱ�ӵ�·�����������е��δ��r�ĭh���У����r��͵ĵ�·�����ܕ����L�� ����������·�@�^�ӝɶ�����ֱ�Ӵ�Խ���� ��һ����Ҫ���]���nj������^��“ influence Mapping ”���������������Ŀ�׃�ɱ�����һ�ӣ�����Ԅ���һ���~���Ӌ��ϵ�y���������õ���·�� AI �С����O�����@��һ���؈D���؈D���ɂ�ͨ�����^ɽ���д����Č�·��Ҫͨ�^�@��ͨ������Xÿ�ήa��һ��ͨ�^�ǂ�ͨ����·������׃�úܓ�D�������Ҫ������Ԯa��һ�� influence map �������P��Щ���l���������ķ����@����X�x�����ȫ��·����Ҳ���Ԏ������������·���̣���ȻҲ��Σ�U�������m������·������ijһ�ض�·���� 5���S�oδ̽�y�ą^������ PC �Α�ĕr���Ƿ�l�F��X�����ܾ��_���x��·���������؈D��δ��̽�y�������Α���f����·�^�ھ��_�������挍�����\���ǣ��@�����}�������������𰸾��Ǟ�ÿ����Һ���X��ÿ����ң�����ÿ����λ --- �Ǖ����M�ܶ��ȴ棩����һ�������� knownWalkability ���M��ÿ�����M����������ѽ�̽�y�ą^�����Ϣ���ͼ��O�ǿɵ��_�������^��ֱ�����C����ʹ���@�N��������λ����·�������ǻ������������e�`���x��ֱ�������܇��ҵ���·�����؈Dһ����̽�y�ˣ���·����ƽ��һ�ӹ����� 6��ƽ��·���� A* �Ԅӽo�㻨�M��С�ģ���̵�·�������������Ԅӽo����ƽ����·�������@�l·���ϣ���һ�������c�����·��������һ�������c�����·��Dz���·������ƽ���أ� �Ўׂ�������Q�@�����}������Ӌ��·���r������ԑ��P��Щ��׃����ķ������� G ֵ����һ���~����_�N����һ�N�x���ǣ�����Ա�v�����ɵ�·����������Щ�������ķ��������ʹ·����ƽ���ĵط��� 7���Ƿ��������^�����҂��������У��҂�ʹ�ö��� 2D �ķ��εą^�������ʹ�ò�Ҏ�t�ą^������ð�U�Α��е���Щ���ң�������OӋһ�����ǘӵČ�·�P��������Ҫ����һ�������������������Pϵ���Լ���һ�������Ƅӵ���һ�����ҵ� G ֵ����߀��Ҫһ�������˹��� H ֵ�������Ķ����������������һ��̎���������� open list ������헕r������ʹ�������ķ����Dz鿴���������ć��ҡ� ��Ƶģ�����Ԟ�һ���̶����εĵ؈D��·������·���cϵ�y��·���cͨ���ǵ�·�����ͨ�����D���c�������Α��OӋ�ߣ�������A���O��·���c������ɂ�·���c���B���]���ϵK���Ԓ������ҕ�������ġ���ð�U�Α�������У�����Ա����@Щ������Ϣ��ij�N���У��� open list ������헕rʹ�á�Ȼ��ӛ� G ֵ�������Ãɂ��Y�c�g��ֱ�����x���� H ֵ������ʹ�ÏĹ��c��Ŀ�˵�ֱ�����x���������Ķ�������һ��̎���� |
���P����
��һƪ��
Windows7ϵ�y�̳̙�Ŀ
��̳�����
ϵ�y���T�̳�
�����Tϵ�y������
1��ȼ��gwin10��ʽ��ghost��32λ����Ş...
2���ѻ��@win10 X86 ghost �˜�ͨ...
3���ѻ��@Win10_Ghost Win10 64...
4����ľ�L GHOST WIN10 X64 �����b...
5��ȼ��gGHOST WIN10 X64 ���F���I...
6�Pӛ��Win10ϵ�y 64λ�ٷ���ʽ��2024��...
7�Pӛ��win10��ʽ��ghost��32λ����Ş��...
8����ľ�Lwin10��32λ��ghost �������I...